¿Estás interesado en la electrónica? ¡Participa en nuestro primer concurso electromaniático! Te damos la oportunidad...
Categorías de blogs
Buscar en blog
Últimas entradas del blog
-
.png "¡¡ PRIMER CONCURSO ELECTROMANIATICO !!") ¡¡ PRIMER CONCURSO ELECTROMANIATICO !!Leer más
¡¡ PRIMER CONCURSO ELECTROMANIATICO !!Leer más -
 Programas gratis de ingeniería electrónicaLeer más
Programas gratis de ingeniería electrónicaLeer másConoce de la mano de Vistrónica cuales son los software de diseño para PCB, si te interesa la electrónica y estas...
-
 ¿Qué es un circuito impreso ?Leer más
¿Qué es un circuito impreso ?Leer másLas placas de circuito impreso o PCB son un tipo de material rígido aislante, cubierta por unas pistas de cobre...
-
 Hans Christian oerstedLeer más
Hans Christian oerstedLeer másHans Christian Oersted nació en Dinamarca en Rudkobing, el 14 de agosto de 1777 fue un químico, físico Danés,...
-
 Jack St. Clair KilbyLeer más
Jack St. Clair KilbyLeer másLos semiconductores son una clase especial de elementos cuya conductividad se encuentra entre la de un buen conductor...
Entradas de blog populares
-
 Componentes Activos y Pasivos¿Conoces cuáles son los componentes pasivos y activos? Aprende y comparte tu conocimiento.Leer más
Componentes Activos y Pasivos¿Conoces cuáles son los componentes pasivos y activos? Aprende y comparte tu conocimiento.Leer más -

-
 ¿Cómo medir corriente en un circuito?Aprende a medir la corriente de un circuito con un multimetroLeer más
¿Cómo medir corriente en un circuito?Aprende a medir la corriente de un circuito con un multimetroLeer más -
 Puente de WheatstoneVeremos el principio de funcionamiento del puente de Wheatstone, algunos ejemplos de circuitos y algunas aplicaciones...Leer más
Puente de WheatstoneVeremos el principio de funcionamiento del puente de Wheatstone, algunos ejemplos de circuitos y algunas aplicaciones...Leer más -
 Conozca cuales son las diferencias entre los transistores BJT y FETSabías que BJT significa transistor de unión bipolar y FET es el acrónimo de Transistor de efecto de campo. Conoce...Leer más
Conozca cuales son las diferencias entre los transistores BJT y FETSabías que BJT significa transistor de unión bipolar y FET es el acrónimo de Transistor de efecto de campo. Conoce...Leer más
Entradas de blog destacadas
-
¡¡ PRIMER CONCURSO ELECTROMANIATICO !!¿Estás interesado en la electrónica? ¡Participa en nuestro primer concurso electromaniático! Te damos la oportunidad...Leer más
-
Programas gratis de ingeniería electrónicaConoce de la mano de Vistrónica cuales son los software de diseño para PCB, si te interesa la electrónica y estas...Leer más
-
¿Qué es un circuito impreso ?Las placas de circuito impreso o PCB son un tipo de material rígido aislante, cubierta por unas pistas de cobre...Leer más
-
Jack St. Clair KilbyLos semiconductores son una clase especial de elementos cuya conductividad se encuentra entre la de un buen conductor...Leer más
-
 Materiales semiconductores Ge, Si Y GaAsLos semiconductores son una clase especial de elementos cuya conductividad se encuentra entre la de un buen conductor...Leer más
Materiales semiconductores Ge, Si Y GaAsLos semiconductores son una clase especial de elementos cuya conductividad se encuentra entre la de un buen conductor...Leer más
Etiquetas de blog
Galería de fotos
-

Galería de fotos

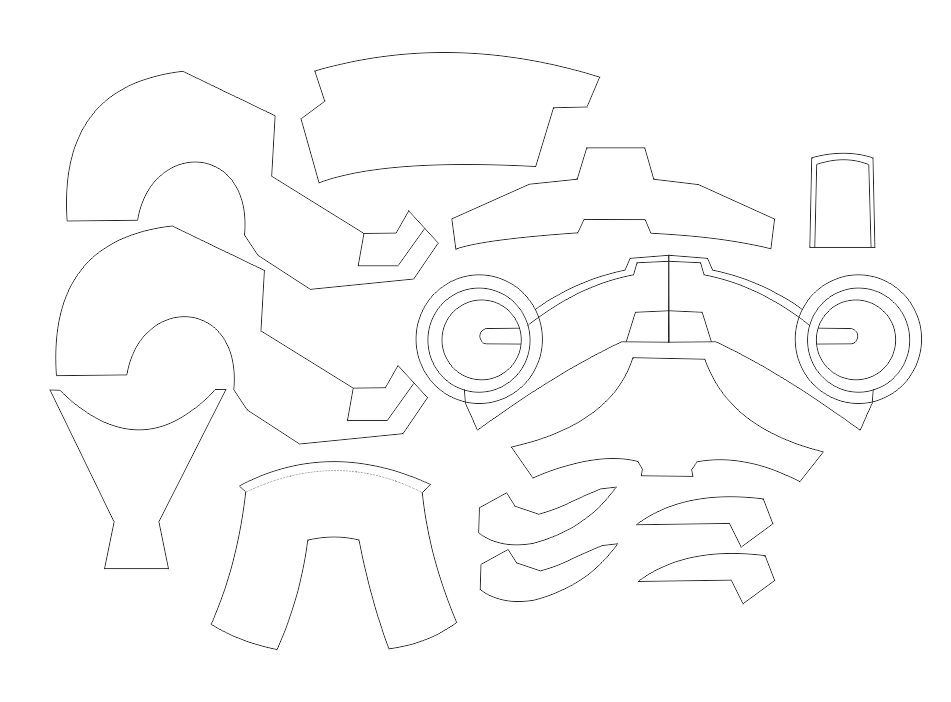
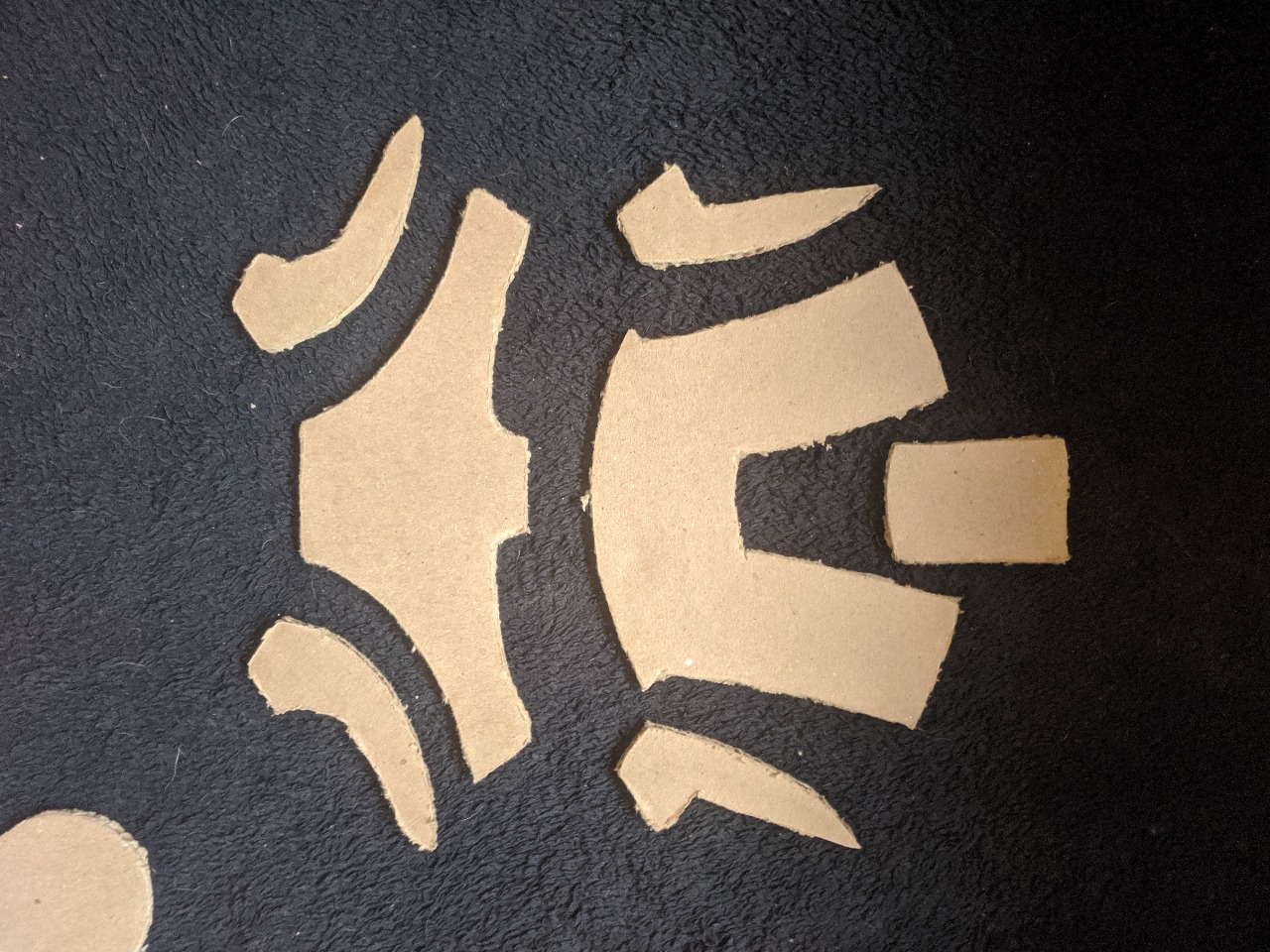
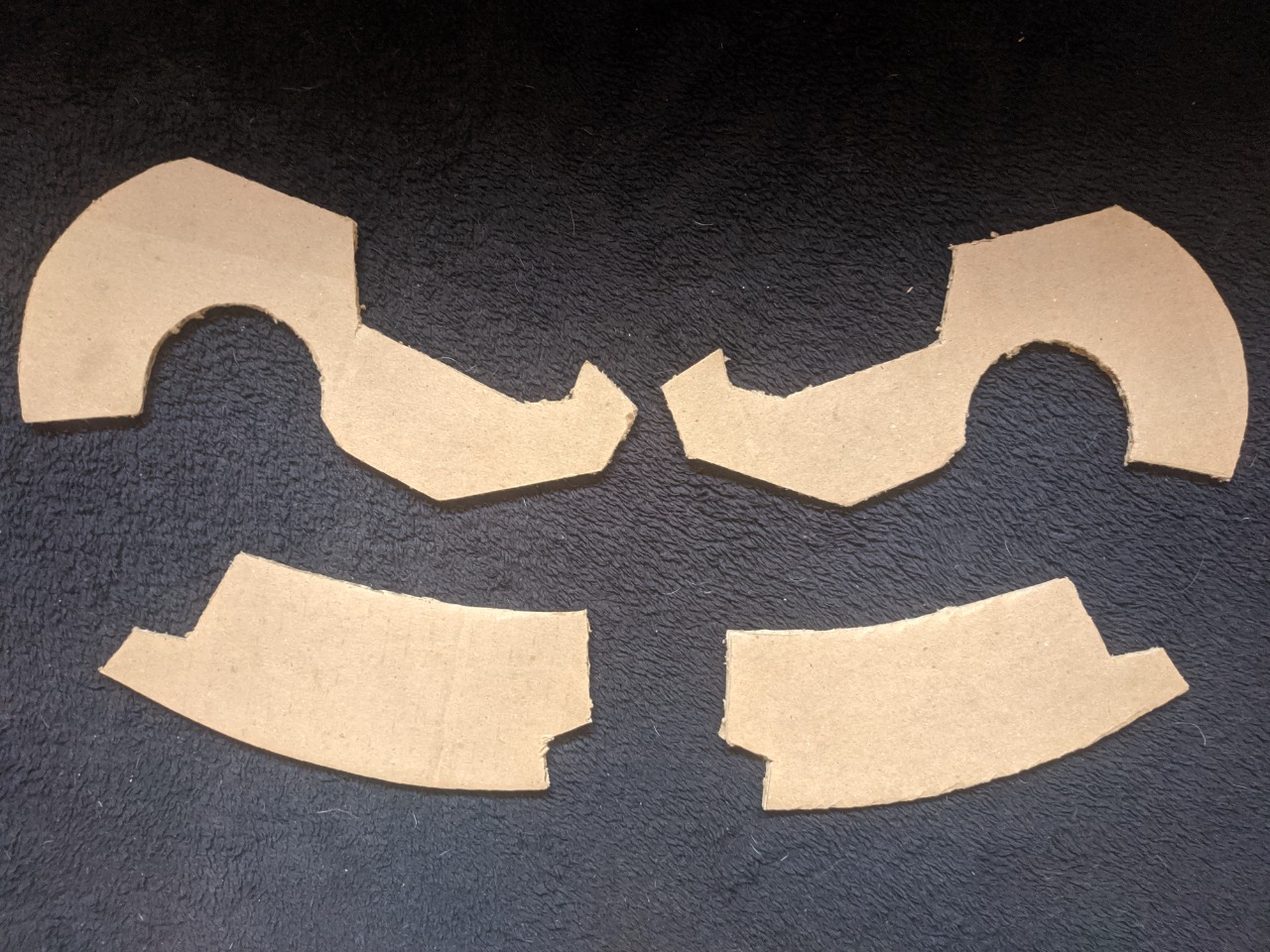
![[TUTORIAL]-En 7 pasos construye tu mascara para HALLOWEEN](https://www.vistronica.com/img/ybc_blog/post/GRANDE.jpg "[TUTORIAL]-En 7 pasos construye tu mascara para HALLOWEEN")




.jpeg)

.jpeg)

.jpeg)
.jpeg)
.jpeg)


![[TUTORIAL]-sistema inteligente LED con ARDUINO](/img/ybc_blog/bg-grey.png)
Últimos comentarios